SYGAV 10.2″ ວິທະຍຸລົດຍົນ Android ສໍາລັບປີ 2006-2011 Honda Civic GPS navigation CarPlay Android Auto WiFi Bluetooth

ຄວາມແຕກຕ່າງລະຫວ່າງສຽງລົດແລະວິດີໂອນໍາທິດລະບົບ Android ແລະ Microsoft
ຂໍ້ດີຂອງລະບົບ Android navigator ມີຫຍັງແດ່?
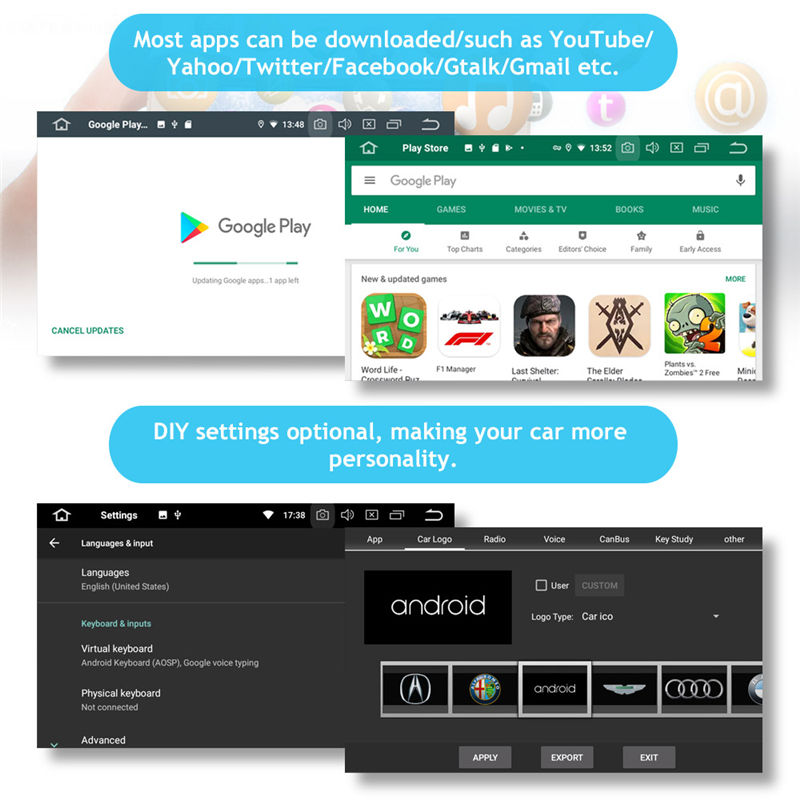
ຫນ້າທໍາອິດ, ລະບົບ Android ເປັນເວທີເປີດ.ລະຫັດເປີດອະນຸຍາດໃຫ້ຜູ້ຂາຍຊໍແວ peripheral ເຊື່ອມຕໍ່ໂດຍກົງກັບການໂຕ້ຕອບຊອບແວຫຼັກ, ເຮັດໃຫ້ມັນເຄື່ອນທີ່ຫຼາຍແລະປະຫຍັດຄ່າໃຊ້ຈ່າຍໃນການຂຽນຄໍາຮ້ອງສະຫມັກຈໍານວນຫຼາຍໂດຍອີງໃສ່ລະບົບ Android.ດ້ວຍວິທີນີ້, ມີຊອບແວພາກສ່ວນທີສາມຫຼາຍອັນທີ່ຮ່ວມມືກັບອຸປະກອນຕໍ່ພ່ວງຂອງຄອມພິວເຕີ Android ຫຼືຜະລິດຕະພັນເອເລັກໂຕຣນິກ.ຊອບແວທີ່ກໍາຫນົດເອງຈໍານວນຫຼາຍສາມາດດາວໂຫຼດໄດ້ຢ່າງງ່າຍດາຍຈາກຕະຫຼາດ Android, ໂຟເດີຖົ່ວແລະເວທີຊອບແວອື່ນໆ.
ອັນທີສອງ, navigator ເຄີຍໃຊ້ລະບົບປະຕິບັດການ WINDOWS CE, ມັນເປັນການຍາກທີ່ຈະຮັບຮູ້ເຖິງຫນ້າທີ່ຂອງການເຊື່ອມຕໍ່ລົດກັບໂທລະສັບມືຖື, WIFI, ແລະການເຂົ້າເຖິງອິນເຕີເນັດ 3G.ໃນຊຸມປີມໍ່ໆມານີ້, ຜູ້ໃຊ້ບໍ່ມີຄວາມເຂັ້ມແຂງຫຼາຍກ່ຽວກັບຫນ້າທີ່ນີ້.ໃນສອງປີທີ່ຜ່ານມາ, ຄວາມນິຍົມຂອງໂທລະສັບສະຫຼາດ Android, ແລະຊອບແວພາກສ່ວນທີສາມຈໍານວນຫຼາຍແມ່ນເພື່ອບັນລຸຫນ້າທີ່ແຕກຕ່າງກັນຫຼາຍຂຶ້ນໂດຍຜ່ານອິນເຕີເນັດ, ສະນັ້ນອຸດສາຫະກໍາຕ້ອງການນີ້ລະບົບນິເວດຊອບແວຂະຫນາດໃຫຍ່ເປີດຂອງລະບົບ Android;
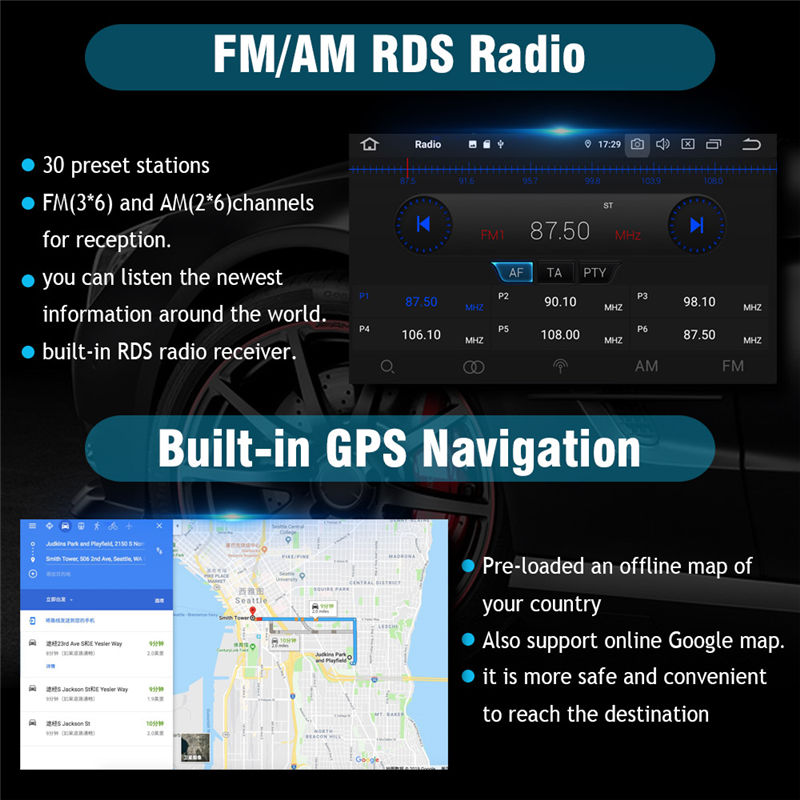
ອັນທີສາມ, ໂຮງງານນໍາທາງແບບດັ້ງເດີມທີ່ຜ່ານມາຍັງໄດ້ນໍາສະເຫນີຫນ້າທີ່ຂອງຄໍາສັ່ງຄວບຄຸມສຽງ, ແຕ່ຄໍາສັ່ງຕ້ອງໄດ້ຮັບການຕັ້ງໄວ້ໃນຖານຂໍ້ມູນການຮັບຮູ້ລ່ວງຫນ້າ, ເຊັ່ນ: ຟັງຊັນນໍາທາງທີ່ໃຊ້ທົ່ວໄປ, ພະຍາຍາມບັນທຶກຄໍາສັ່ງຕື່ມອີກສອງສາມຄໍາສັ່ງລ່ວງຫນ້າ, ເຊັ່ນ "ເປີດ. navigation", "Open map", "Open GPS", ຖ້າບໍ່ມີການເກັບຮັກສາ, ເຈົ້າຂອງຈະເວົ້າວ່າ "Open satellite navigation", navigator ຈະບໍ່ເຂົ້າໃຈຄໍາສັ່ງນີ້, ແຕ່ຖ້າທ່ານເຂົ້າເຖິງພື້ນຖານຄອມພິວເຕີຟັງຜ່ານເຄືອຂ່າຍ 3G. ຄຳສັ່ງສຽງອັນໃດອັນໜຶ່ງຈະເຂົ້າສູ່ການວິເຄາະຂໍ້ມູນຄວາມໄວສູງ.ຄໍາສັ່ງນໍາທາງໃດກໍ່ຕາມ, ເຊັ່ນ "ຂ້ອຍຕ້ອງການ GPS", ຍັງສາມາດຖືກປະຕິບັດໂດຍ Android navigator.
ເປັນຫຍັງທ່ານຈໍາເປັນຕ້ອງເວົ້າກ່ຽວກັບຫນ້າທີ່ຄວບຄຸມສຽງໂດຍສະເພາະ, ເພາະວ່າຄໍາສັ່ງນີ້ແມ່ນການປ່ຽນແປງຫນ້າທີ່ປະຕິວັດສໍາລັບການຂັບຂີ່.ຟັງຊັນການຄວບຄຸມສຽງແມ່ນບໍ່ຊັດເຈນໃນພື້ນທີ່ອື່ນໆ, ແຕ່ມັນເປັນສະພາບແວດລ້ອມທີ່ຂ້ອນຂ້າງປິດຢູ່ໃນລົດ, ເຫມາະສົມສໍາລັບຄໍາສັ່ງທີ່ຊັດເຈນ.ການປະຕິບັດການຂັບຂີ່ຍັງຕ້ອງການຄວາມປອດໄພຫຼາຍ, ດັ່ງນັ້ນໃນເວລາຂັບຂີ່, ຄໍາສັ່ງສຽງຖືກນໍາໃຊ້ເພື່ອຫຼຸດຜ່ອນຄວາມສົນໃຈອອກຈາກການຂັບຂີ່ໃນລະຫວ່າງຂະບວນການຂັບຂີ່ແລະລົບກວນການເຮັດວຽກຂອງເຄື່ອງນໍາທາງ.